






























{kind=link}
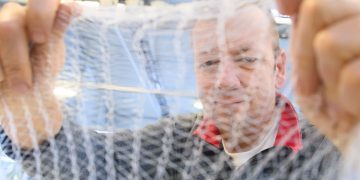
Əksər robotlar həddindən artıq həcmli və sərt ola bilən motorlu vasitələr vasitəsilə tutma və toxunma duyğusuna nail olurlar. Cornell Universiteti qrupu, insanların etdiyi kimi, yumşaq robotun ətrafını daxilən hiss etməsi üçün bir yol hazırladı.
Mexanika və aerokosmik mühəndislik kafedrasının dosenti və baş müstəntiq Robert Şeferdin rəhbərlik etdiyi qrup. Üzvi Robotlar Laboratoriyası, uzanan optik dalğa ötürücülərinin yumşaq robot əlində əyrilik, uzanma və güc sensorları kimi necə fəaliyyət göstərdiyini təsvir edən bir məqalə dərc etdi.
Doktorant Huichan Zhao "" kitabının aparıcı müəllifidir.Dartıla bilən optik dalğa bələdçiləri vasitəsilə optoelektronik innervasiya edilmiş yumşaq protez əl"Science Robotics" jurnalının debüt nəşrində nümayiş etdirilir. Qəzet dekabrın 6-da dərc edilmişdir; Shepherd's laboratoriyasının doktorantları Kevin O'Brien və Shuo Li də öz töhfələrini verdilər.
Zhao, "Bu gün əksər robotların bədənin kənarında səthdən şeyləri aşkar edən sensorlar var" dedi. "Bizim sensorlarımız bədənə inteqrasiya olunub, ona görə də onlar robotun qalınlığından ötürülən qüvvələri aşkar edə bilirlər, məsələn, ağrı hiss etdiyimiz zaman bizim və bütün orqanizmlərin etdiyi kimi."
Optik dalğa ötürücüləri 1970-ci illərin əvvəllərindən toxunma, mövqe və akustik daxil olmaqla çoxsaylı hissetmə funksiyaları üçün istifadə olunur. İstehsal əvvəlcə mürəkkəb bir proses idi, lakin son 20 ildə yumşaq litoqrafiya və 3-D çapın yaranması asanlıqla istehsal olunan və yumşaq robot tətbiqinə daxil edilən elastomer sensorların inkişafına səbəb oldu.
Shepherd's qrupu, nüvəni (işığın yayıldığı) və həmçinin LED (işıq yayan diod) və fotodiodun yerləşdiyi örtük (dalğa bələdçisinin xarici səthi) yaratmaq üçün dörd addımlı yumşaq litoqrafiya prosesindən istifadə etdi.
Protez əl nə qədər deformasiyaya uğrayarsa, nüvədən bir o qədər çox işıq itirilir. Fotodiod tərəfindən aşkar edilən dəyişkən işıq itkisi protezə ətrafı "hiss etməyə" imkan verir.
"Protezi əyərkən işıq itirilməsəydi, sensorun vəziyyəti haqqında heç bir məlumat ala bilməzdik" dedi Shepherd. "İtki miqdarı onun necə əyilməsindən asılıdır."
Qrup öz optoelektron protezindən həm forma, həm də teksturaya görə tutma və zondlama daxil olmaqla müxtəlif tapşırıqları yerinə yetirmək üçün istifadə etdi. Ən diqqətəlayiq haldır ki, əl üç pomidoru skan edə və yumşaqlığına görə ən yetişmiş pomidoru müəyyən edə bildi.
Zhao, bu texnologiyanın protezlərdən başqa bir çox potensial istifadəyə malik olduğunu, o cümlədən Shepherd-in kəşf etdiyi bio-ruhlandıran robotların olduğunu söylədi. Meyson Pek, mexanika və aerokosmik mühəndislik kafedrasının dosenti, kosmik tədqiqatlarda istifadə üçün.
Shepherd, Pek ilə əməkdaşlığa istinad edərək, "Bu layihənin heç bir hissiyyatı yoxdur" dedi, "amma bizdə sensorlar olsaydı, biz real vaxtda yanma zamanı [su elektrolizi vasitəsilə] forma dəyişikliyinə nəzarət edə və daha yaxşı hərəkət ardıcıllığı inkişaf etdirə bilərdik. daha sürətli hərəkət edir."
Yumşaq robototexnikada optik dalğa ötürücüləri üzərində gələcək iş, daha mürəkkəb sensor formalarının 3-D çapı və artan sayda sensordan siqnalları ayırmaq üçün maşın öyrənməsini daxil etməklə, artan sensor imkanlara yönəldiləcəkdir. "Hal-hazırda," Shepherd dedi, "toxunmanın haradan gəldiyini müəyyən etmək çətindir."
Bu iş Hərbi Hava Qüvvələri Elmi Tədqiqatlar İdarəsinin qrantı ilə dəstəkləndi və istifadə edildi Cornell NanoScale Elm və Texnologiya Mexanizmi və Kornel Material Tədqiqat Mərkəzi, hər ikisi Milli Elm Fondu tərəfindən dəstəklənir.
- Tom Fleischman, Kornell Universiteti